Video Tutorial
![]()
Image Segmentation with Ivy UNet#
UNet model for image segmentation.Since we want the packages to be available after installing, after running the first cell, the notebook will automatically restart.
You can then do Runtime -> Run all after the notebook has restarted, to run all of the cells.
Make sure you run this demo with GPU enabled!
[ ]:
!pip install -q ivy
!pip install -q dm-haiku
!git clone https://github.com/unifyai/models.git --depth 1
# Installing models package from cloned repository! 😄
!cd models/ && pip install .
exit()
Imports#
[1]:
import ivy
ivy.set_default_device("gpu:0")
import torch
import numpy as np
Data Preparation#
Custom Preprocessing#
[2]:
# ref: https://github.com/milesial/Pytorch-UNet/blob/2f62e6b1c8e98022a6418d31a76f6abd800e5ae7/utils/data_loading.py#L65
def preprocess(mask_values, pil_img, scale, is_mask):
w, h = pil_img.size
newW, newH = int(scale * w), int(scale * h)
assert newW > 0 and newH > 0, 'Scale is too small, resized images would have no pixel'
pil_img = pil_img.resize((newW, newH), resample=Image.NEAREST if is_mask else Image.BICUBIC)
img = np.asarray(pil_img)
if is_mask:
mask = np.zeros((newH, newW), dtype=np.int64)
for i, v in enumerate(mask_values):
if img.ndim == 2:
mask[img == v] = i
else:
mask[(img == v).all(-1)] = i
return mask
else:
if img.ndim == 2:
img = img[np.newaxis, ...]
else:
img = img.transpose((2, 0, 1))
if (img > 1).any():
img = img / 255.0
return img
Load the image example 🖼️#
[ ]:
# Preprocess image
from PIL import Image
!wget https://raw.githubusercontent.com/unifyai/models/master/images/car.jpg
filename = "car.jpg"
full_img = Image.open(filename)
torch_img = torch.from_numpy(preprocess(None, full_img, 0.5, False)).unsqueeze(0).to("cuda")
[4]:
# Convert to ivy
ivy.set_backend("torch")
img = ivy.asarray(torch_img.permute((0, 2, 3, 1)), dtype="float32", device="gpu:0")
img_numpy = img.cpu().numpy()
Visualise image#
[5]:
from IPython.display import Image as I, display
display(I(filename))

Model Inference#
Initializing Native Torch UNet#
[ ]:
torch_unet = torch.hub.load('milesial/Pytorch-UNet', 'unet_carvana', pretrained=True, scale=1.0)
torch_unet.to("cuda")
torch_unet.eval()
Initializing Ivy UNet with Pretrained Weights ⬇️#
The model is then initialized with the Pretrained Weights when pretrained=True 🔗.
[7]:
# load the unet model from ivy_models
import ivy_models
ivy_unet = ivy_models.unet_carvana(n_channels=3, n_classes=2, pretrained=True)
Trace the forward pass for efficiency.
[ ]:
ivy_unet.trace_graph(args=(img,))
Custom masking function#
[9]:
# ref: https://github.com/milesial/Pytorch-UNet/blob/2f62e6b1c8e98022a6418d31a76f6abd800e5ae7/predict.py#L62
def mask_to_image(mask: np.ndarray, mask_values):
if isinstance(mask_values[0], list):
out = np.zeros((mask.shape[-2], mask.shape[-1], len(mask_values[0])), dtype=np.uint8)
elif mask_values == [0, 1]:
out = np.zeros((mask.shape[-2], mask.shape[-1]), dtype=bool)
else:
out = np.zeros((mask.shape[-2], mask.shape[-1]), dtype=np.uint8)
if mask.ndim == 3:
mask = np.argmax(mask, axis=0)
for i, v in enumerate(mask_values):
out[mask == i] = v
return Image.fromarray(out)
Use the model to segment your images 🚀#
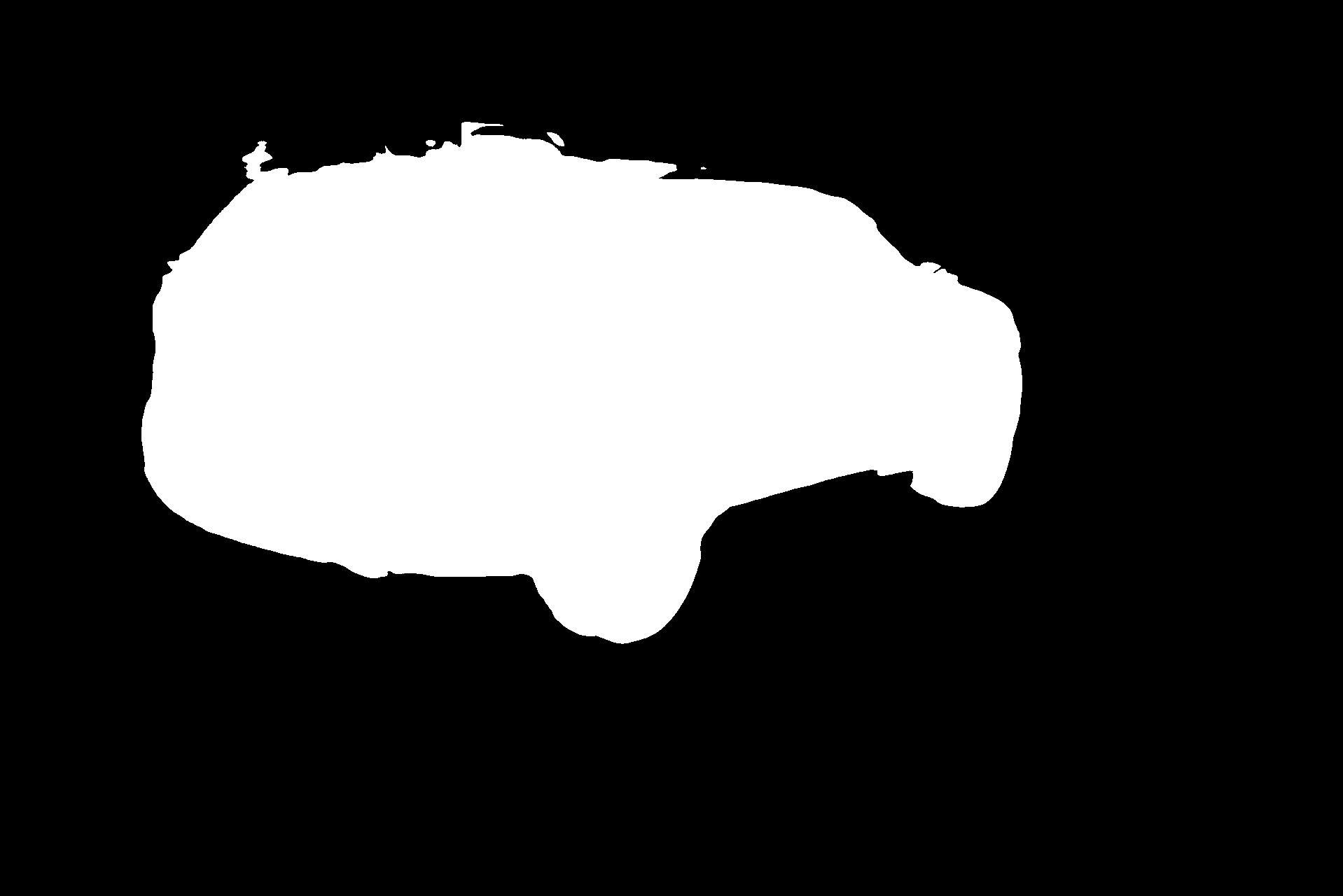
First, we will generate the reference mask from the reference model.
Torch UNet
[10]:
torch_output = torch_unet(torch_img.to(torch.float32))
torch_output = torch.nn.functional.interpolate(torch_output, (full_img.size[1], full_img.size[0]), mode="bilinear")
torch_mask = torch_output.argmax(axis=1)
torch_mask = torch_mask[0].squeeze().cpu().numpy()
torch_result = mask_to_image(torch_mask, [0,1])
torch_result
[10]:
Next we will generate the mask from the Ivy native implementation
Ivy UNet
[11]:
output = ivy_unet(img)
output = ivy.interpolate(output.permute((0, 3, 1, 2)), (full_img.size[1], full_img.size[0]), mode="bilinear")
mask = output.argmax(axis=1)
mask = ivy.squeeze(mask[0], axis=None).to_numpy()
result = mask_to_image(mask, [0,1])
result
[11]:
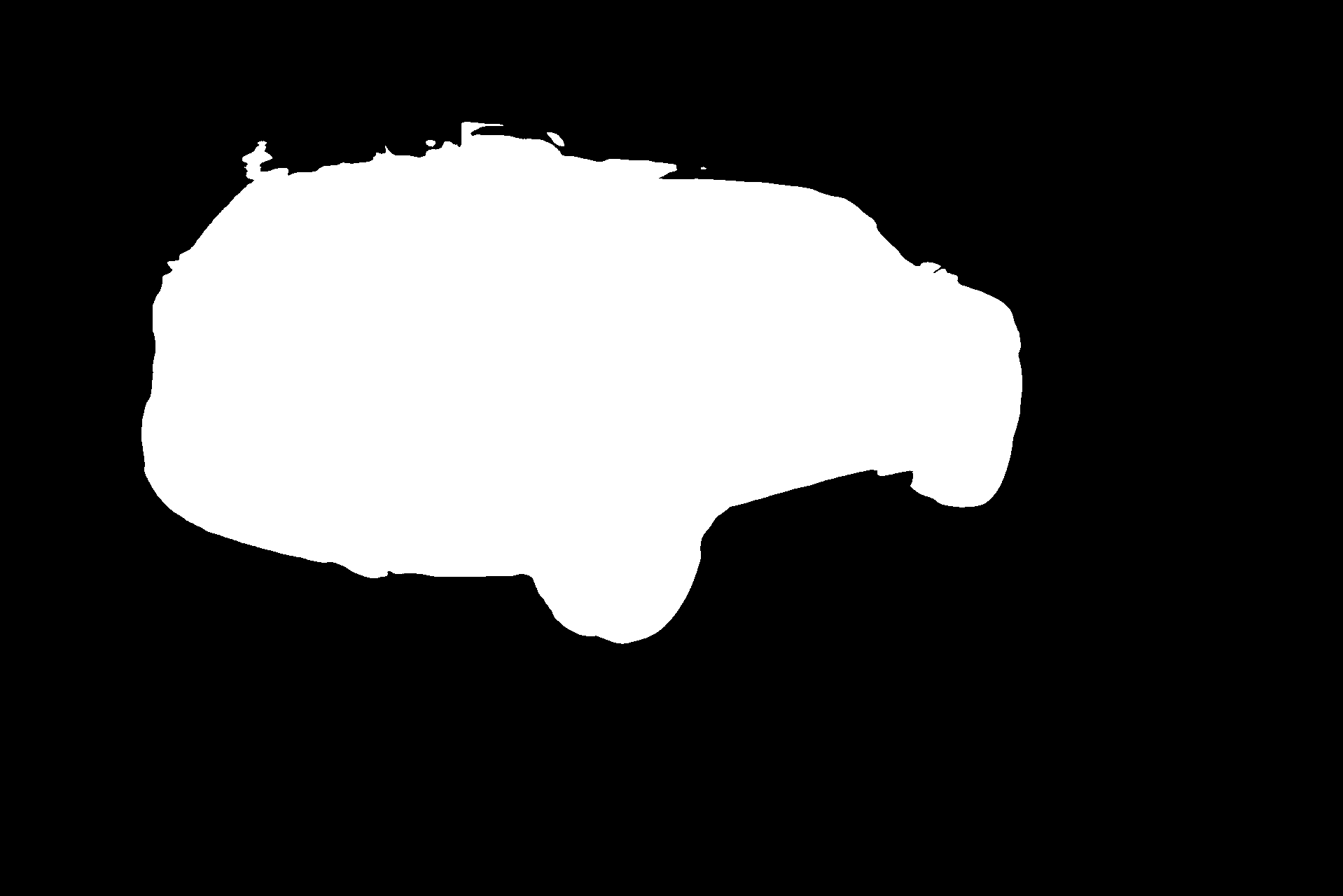
Great! The ivy native model and the torch model give the same result!
TensorFlow backend#
Let’s look at using the TensorFlow backend.
[12]:
import tensorflow as tf
ivy.set_backend("tensorflow")
ivy_unet = ivy_models.unet_carvana(n_channels=3, n_classes=2, pretrained=True)
img_tf = ivy.asarray(img_numpy)
ivy_unet = ivy.trace_graph(ivy_unet, args=(img_tf,))
[13]:
output = ivy_unet(img_tf)
output = ivy.interpolate(tf.transpose(output, (0, 3, 1, 2)), (full_img.size[1], full_img.size[0]), mode="bilinear")
mask = tf.math.argmax(output, axis=1)
mask = tf.squeeze(mask[0], axis=None).numpy()
result = mask_to_image(mask, [0,1])
result
[13]:
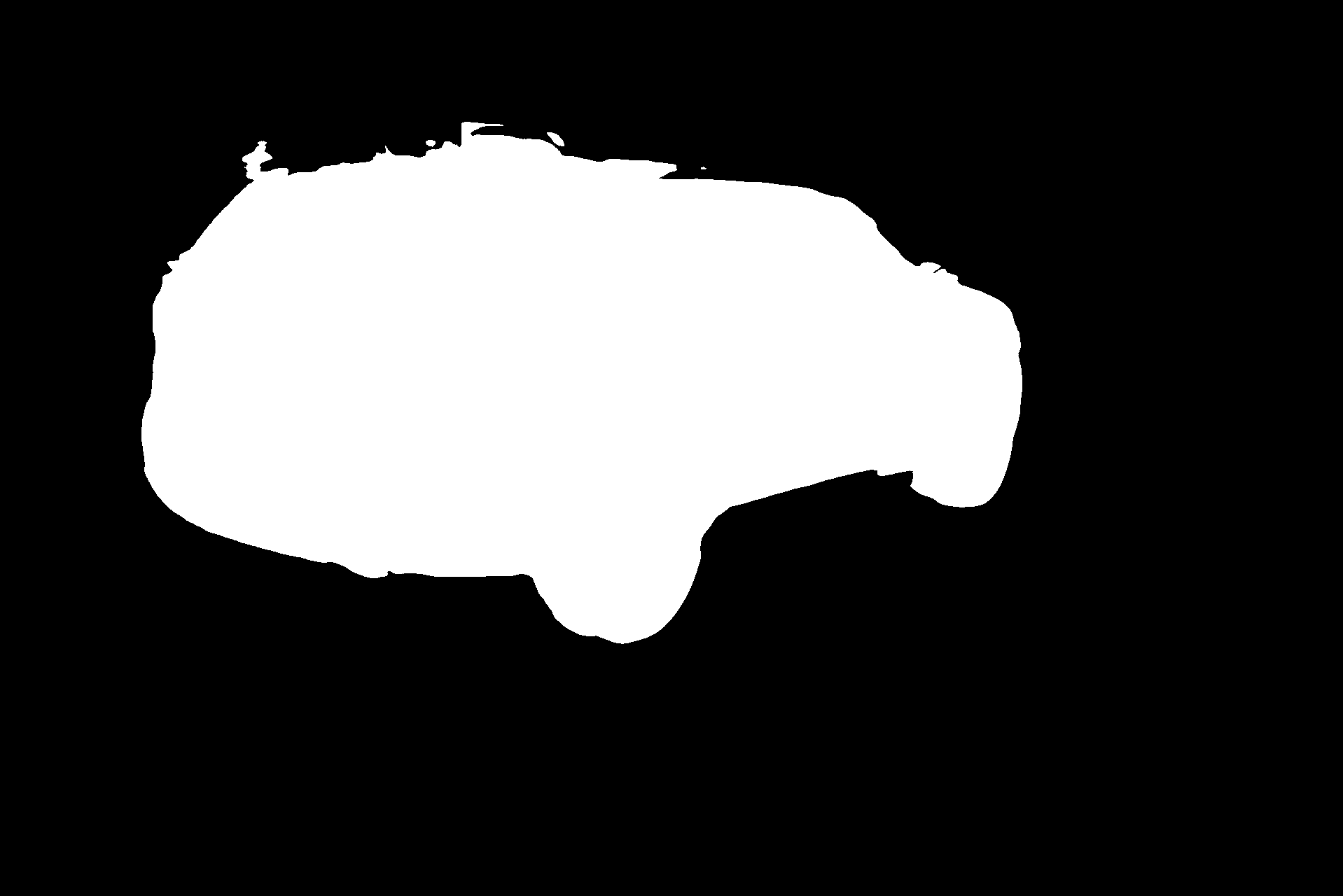
As expected, we ended up with the same mask as before. Note how with the TensorFlow backend, we were able to use TensorFlow native functions to do the post-processing.
JAX#
Next up is the JAX backend. We’ve used a lot of the notebook memory so far, so we’ll free up some space.
[14]:
del torch_unet
del ivy_unet
torch.cuda.empty_cache()
[15]:
# Overrides Jax's default behavior of preallocating 75% of GPU memory
# Temporary fix until this is handled by ivy's graph tracer
import os
os.environ["XLA_PYTHON_CLIENT_ALLOCATOR"] = "platform"
import jax
jax.config.update('jax_enable_x64', True)
ivy.set_default_device("cpu")
ivy.set_backend("jax")
ivy_unet = ivy_models.unet_carvana(n_channels=3, n_classes=2, pretrained=True)
[16]:
img_jax = ivy.asarray(img_numpy)
output = ivy_unet(img_jax)
output = ivy.interpolate(ivy.permute_dims(output, (0, 3, 1, 2)), (full_img.size[1], full_img.size[0]), mode="bilinear")
mask = output.argmax(axis=1)
mask = ivy.squeeze(mask[0], axis=None).to_numpy()
result = mask_to_image(mask, [0,1])
result
/usr/local/lib/python3.10/dist-packages/ivy/func_wrapper.py:242: UserWarning: Creating many views will lead to overhead when performing inplace updates with this backend
warnings.warn(
[16]:
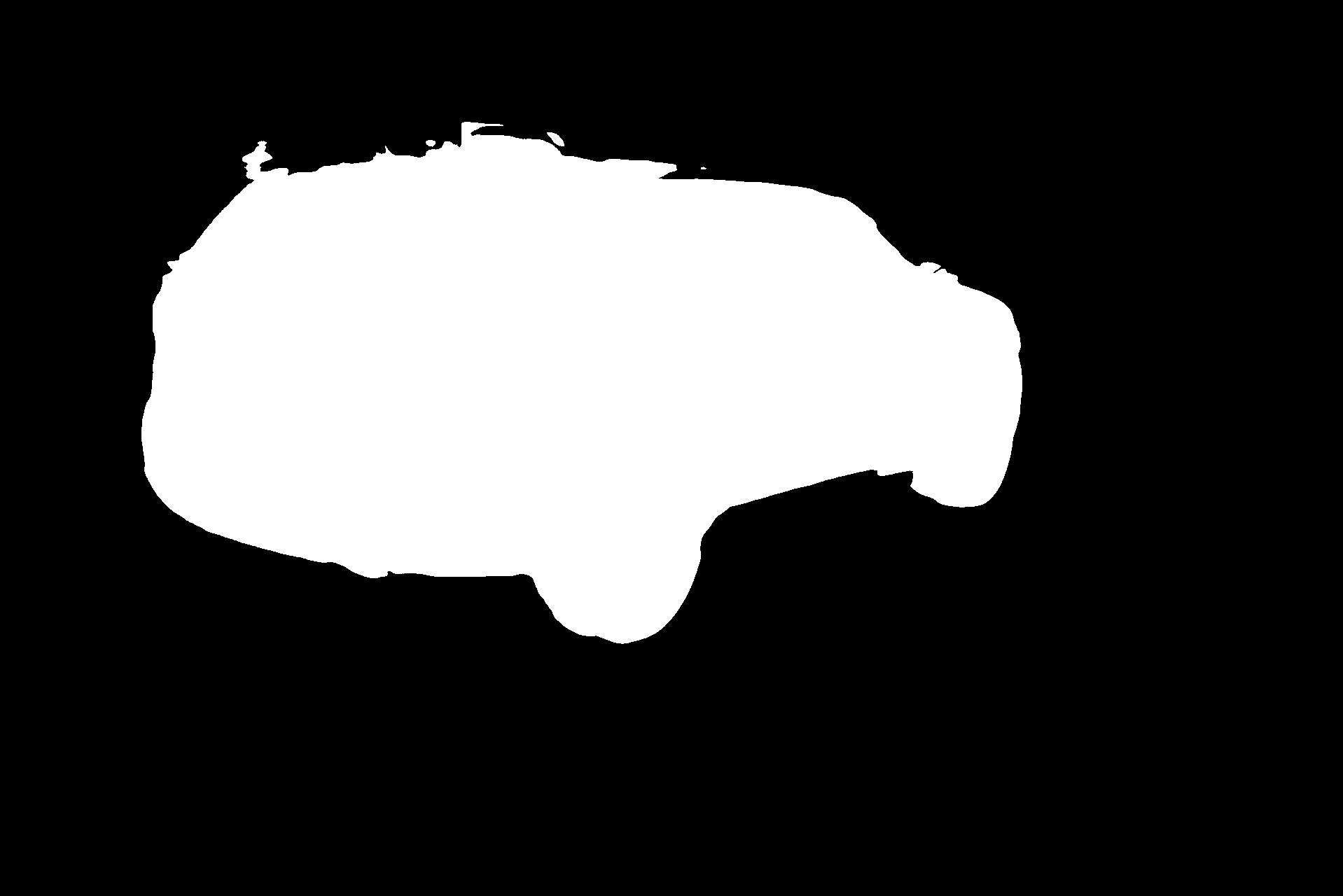
Once again, we ended up with the same mask as in the reference torch implementation!
Appendix: the Ivy native implementation of UNet#
[17]:
class UNET(ivy.Module):
def __init__(self, n_channels, n_classes, bilinear=False, v=None):
self.n_channels = n_channels
self.n_classes = n_classes
self.bilinear = bilinear
self.factor = 2 if bilinear else 1
super(UNET, self).__init__(v=v)
def _build(self, *args, **kwargs):
self.inc = UNetDoubleConv(self.n_channels, 64)
self.down1 = UNetDown(64, 128)
self.down2 = UNetDown(128, 256)
self.down3 = UNetDown(256, 512)
self.down4 = UNetDown(512, 1024 // self.factor)
self.up1 = UNetUp(1024, 512 // self.factor, self.bilinear)
self.up2 = UNetUp(512, 256 // self.factor, self.bilinear)
self.up3 = UNetUp(256, 128 // self.factor, self.bilinear)
self.up4 = UNetUp(128, 64, self.bilinear)
self.outc = UNetOutConv(64, self.n_classes)
def _forward(self, x):
x1 = self.inc(x)
x2 = self.down1(x1)
x3 = self.down2(x2)
x4 = self.down3(x3)
x5 = self.down4(x4)
x = self.up1(x5, x4)
x = self.up2(x, x3)
x = self.up3(x, x2)
x = self.up4(x, x1)
logits = self.outc(x)
return logits
class UNetDoubleConv(ivy.Module):
def __init__(self, in_channels, out_channels, mid_channels=None):
self.in_channels = in_channels
self.out_channels = out_channels
self.mid_channels = mid_channels if mid_channels else out_channels
super(UNetDoubleConv, self).__init__()
def _build(self, *args, **kwargs):
self.double_conv = ivy.Sequential(
ivy.Conv2D(
self.in_channels, self.mid_channels, [3, 3], 1, 1, with_bias=False
),
ivy.BatchNorm2D(self.mid_channels),
ivy.ReLU(),
ivy.Conv2D(
self.mid_channels, self.out_channels, [3, 3], 1, 1, with_bias=False
),
ivy.BatchNorm2D(self.out_channels),
ivy.ReLU(),
)
def _forward(self, x):
return self.double_conv(x)
class UNetDown(ivy.Module):
"""Downscaling with maxpool then double conv"""
def __init__(self, in_channels, out_channels):
self.in_channels = in_channels
self.out_channels = out_channels
super().__init__()
def _build(self, *args, **kwargs):
self.maxpool_conv = ivy.Sequential(
ivy.MaxPool2D(2, 2, 0), UNetDoubleConv(self.in_channels, self.out_channels)
)
def _forward(self, x):
return self.maxpool_conv(x)
class UNetUp(ivy.Module):
"""Upscaling then double conv"""
def __init__(self, in_channels, out_channels, bilinear=True):
self.in_channels = in_channels
self.out_channels = out_channels
self.bilinear = bilinear
super().__init__()
def _build(self, *args, **kwargs):
if self.bilinear:
self.up = ivy.interpolate(
scale_factor=2, mode="bilinear", align_corners=True
)
self.conv = UNetDoubleConv(
self.in_channels, self.out_channels, self.in_channels // 2
)
else:
self.up = ivy.Conv2DTranspose(
self.in_channels, self.in_channels // 2, [2, 2], 2, "VALID"
)
self.conv = UNetDoubleConv(self.in_channels, self.out_channels)
def _forward(self, x1, x2):
x1 = self.up(x1)
# input is BHWC
diff_H = x2.shape[1] - x1.shape[1]
diff_W = x2.shape[2] - x1.shape[2]
pad_width = (
(0, 0),
(diff_H - diff_H // 2, diff_H // 2),
(diff_W // 2, diff_W - diff_W // 2),
(0, 0),
)
x1 = ivy.constant_pad(x1, pad_width)
x = ivy.concat((x2, x1), axis=3)
return self.conv(x)
class UNetOutConv(ivy.Module):
def __init__(self, in_channels, out_channels):
self.in_channels = in_channels
self.out_channels = out_channels
super(UNetOutConv, self).__init__()
def _build(self, *args, **kwargs):
self.conv = ivy.Conv2D(self.in_channels, self.out_channels, [1, 1], 1, 0)
def _forward(self, x):
return self.conv(x)